

新闻中心
联系我们
【概要描述】此案例重点在于介绍机器人堆垛系统,用以完成12条低速生产线与10条高速生产线输出牛奶箱的堆垛工作。
在方案中,从客户对堆垛系统的具体要求出发,在介绍了堆垛系统各组成部分之后,对该系统的工作原理与流程进行了阐述,最后对重要组成部分的性能指标作了简单的描述。

【概要描述】此案例重点在于介绍机器人堆垛系统,用以完成12条低速生产线与10条高速生产线输出牛奶箱的堆垛工作。
在方案中,从客户对堆垛系统的具体要求出发,在介绍了堆垛系统各组成部分之后,对该系统的工作原理与流程进行了阐述,最后对重要组成部分的性能指标作了简单的描述。
ABB IRB660机器人在粮油食品饮料行业中的应用
1 概述
此案例重点在于介绍机器人堆垛系统,用以完成12条低速生产线与10条高速生产线输出牛奶箱的堆垛工作。
在方案中,从客户对堆垛系统的具体要求出发,在介绍了堆垛系统各组成部分之后,对该系统的工作原理与流程进行了阐述,最后对重要组成部分的性能指标作了简单的描述。
2 基本信息
2.1 成品码盘设计
成品高架库内承载托盘的规格:(W)1000mm(L)1200mm(H)150mm
2.2 含托盘货物最高1350mm
2.3 成品牛奶箱规格
低速生产线牛奶箱规格有两种,其外形尺寸分别为:
(1) (W)200mm(L)353mm(H)116mm
(2) (W)235mm(L)240mm(H)143mm
经过综合考虑,分别为两种规格的牛奶箱设计垛形,如图1-2所示。
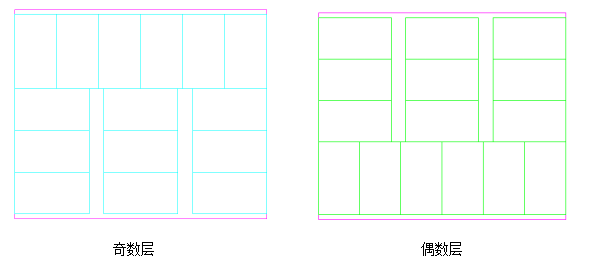
图1 牛奶箱(1)的垛形
高度: 1350mm(含托盘)
重量:约6-8kg/箱, 15箱/层,共10层,约900-1200Kg(不含托盘)
数量:150件
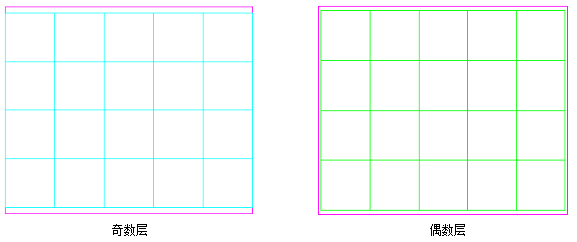
图2 牛奶箱(2)的垛形
高度: 1350mm(含托盘)
重量:约6-8kg/箱, 15箱/层,共8层,约720-960Kg(不含托盘)
数量:150件
高速生产线牛奶箱的规格有一种,其外形尺寸为:
(W)204mm(L)340mm(H)116mm
同样为该规格的牛奶箱设计垛形,如图3所示。
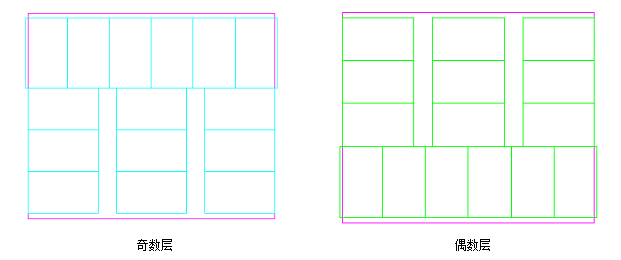
图3 高速生产线牛奶箱的垛形
高度:1350mm(含托盘)
重量:约6-8kg/箱, 共10层,约900-1200Kg(不含托盘)
数量:150件;
3 方案描述
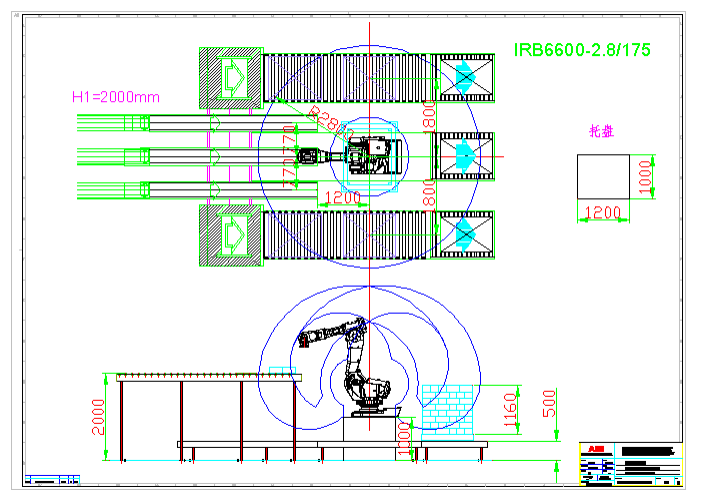
3.1产量为843箱/小时10条生产线上的堆垛机器人系统,使用ABB机器人来进行操作
·本方案中共配五套机器人堆垛系统,每台机器人处理两条生产线上的输出牛奶箱。
·机器人堆垛系统由两条牛奶箱输入传送带,两条托盘输出传送带,IRB6600-2.8/175机器人配备底座以及夹具等组成。
·输入传送带的控制系统每次输入六个牛奶箱并定位,以供机器人进行堆垛。
·机器人采取一抓一放或一抓二放的方式,每次从输入传送带上吸取或抓取六个牛奶箱;并放置在相应输出传送带相应的位置上;
·具体工作流程:
a. 输入传送带将牛奶箱输入定位,并由总控PLC通知机器人牛奶箱到位;
b.输出传送带将托盘输入定位,并由总控PLC通知机器人输出托盘到位;
c.机器人到牛奶箱输入位置吸取或抓取牛奶箱,完成吸取或抓取牛奶箱后通知总控PLC牛奶箱已吸走或抓走;
d.总控PLC通知输入传送带输入新牛奶箱;
e.机器人根据垛型要求将吸取或抓取的牛奶箱摆放在输出托盘上;
f.如一垛牛奶箱完成堆垛后,机器人将通知总控PLC托盘堆垛完成;
g.总控PLC将通知输出传送带送走完成堆垛的满托盘并输入新空托盘。
h.关于非满垛情况机器人堆垛情况说明和分析:
当牛奶箱输入传送带输入最后一个同品种牛奶箱时,待此牛奶箱到位后,总控PLC通知机器人此为最后的牛奶箱,并通知机器人此次抓取几个牛奶箱。机器人在堆完此次牛奶箱后,通知总控PLC堆垛完毕,总控PLC通知托盘传送带,将堆垛完毕的托盘送走并送入新的空托盘。
·如堆垛过程中产生意外情况,如机器人吸取或抓取牛奶箱失败,机器人未完成工作托盘即被送走等情况,机器人将立即停止工作并等待人工诊断处理。
·循环时间分析:根据此种工作方式,如每次抓取或吸取六箱,每台机器人每小时约完成1800个牛奶箱的堆垛工作,五台机器人每小时约完成9000个牛奶箱的堆垛工作。(不含等待传送带将牛奶箱或托盘运输到位或移走的时间。)
3.1.1 平面图
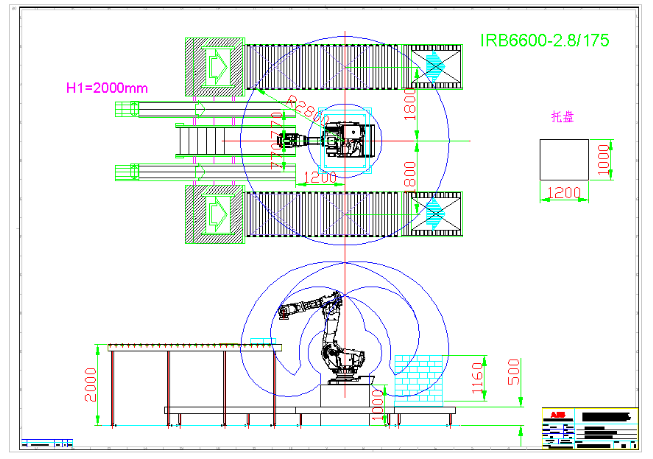
3.2产量为500箱/小时12条生产线上的堆垛机器人系统
·本方案中共配四套机器人堆垛系统,每台机器人处理三条生产线上的输出牛奶箱。
·机器人堆垛系统由三条牛奶箱输入传送带,三条托盘输出传送带,IRB6600-2.8/175机器人配备底座以及夹具等组成。
·输入传送带的控制系统每次输入五个或六个牛奶箱并定位,以供机器人进行堆垛。
·机器人采取一抓一放或一抓二放的方式,每次从输入传送带上吸取或抓取五或六个牛奶箱;并放置在相应输出传送带相应的位置上;
·具体工作流程:
a. 输入传送带将牛奶箱输入定位,并由总控PLC通知机器人牛奶箱到位;
i.输出传送带将托盘输入定位,并由总控PLC通知机器人输出托盘到位;
j.机器人到牛奶箱输入位置吸取或抓取牛奶箱,完成吸取或抓取牛奶箱后通知总控PLC牛奶箱已吸走或抓走;
k.总控PLC通知输入传送带输入新牛奶箱;
l.机器人根据垛型要求将吸取或抓取的牛奶箱摆放在输出托盘上;
m.如一垛牛奶箱完成堆垛后,机器人将通知总控PLC托盘堆垛完成;
n.总控PLC将通知输出传送带送走完成堆垛的满托盘并输入新空托盘。
o.关于非满垛情况机器人堆垛情况说明和分析:
当牛奶箱输入传送带输入最后一个同品种牛奶箱时,待此牛奶箱到位后,总控PLC通知机器人此为最后的牛奶箱,并通知机器人此次抓取几个牛奶箱。机器人在堆完此次牛奶箱后,通知总控PLC堆垛完毕,总控PLC通知托盘传送带,将堆垛完毕的托盘送走并送入新的空托盘。
·如堆垛过程中产生意外情况,如机器人吸取或抓取牛奶箱失败,机器人未完成工作托盘即被送走等情况,机器人将立即停止工作并等待人工诊断处理。
·循环时间分析:根据此种工作方式,对于牛奶箱(1)的垛形,每次抓取或吸取六箱,每台机器人每小时约完成1800个牛奶箱的堆垛工作,四台机器人每小时约完成7200个牛奶箱的堆垛工作。(不含等待传送带将牛奶箱或托盘运输到位或移走的时间。)对于牛奶箱(2)的垛形,每次抓取或吸取五箱,每台机器人每小时约完成1700个牛奶箱的堆垛工作,四台机器人每小时约完成6800个牛奶箱的堆垛工作。(不含等待传送带将牛奶箱或托盘运输到位或移走的时间。)
3.2.1 平面图
3.3 机器人IRB6600-2.8/175性能指标及参数
·本体部分:
手腕持重: 175 kg
最大臂展半径:2.8m
轴数:6轴
重复定位精度:0.1mm
防护等级: IP67
轴运动:轴 动作范围 最大速度
1 回转+180至-180100/s
2 立臂+ 85至- 65 90/s
3 横臂+ 70至-180 90/s
4 腕 +300至-300150/s
5 腕摆+120至-120120/s
6 腕传+360至-360190/s
电源:3相四线 400V(+10%,-15%), 50Hz
耗电量:8.5 KVA
机器人尺寸: 底座:1136 x 850mm
机器人重量:1,780kg
环境温度:5C- 50C
最大湿度:95%
最大噪音: 73dB(A)
·IRC5控制柜
控制硬件: 多处理器系统
总线结构
奔腾CPU
闪存(128M)
20s UPS 备份电源
控制软件:BaseWare 5.0 机器人操作系统
强大的RAPID编程语言
PC-DOS文本格式
软件出厂预装,并存于光碟
电源:3相400V(+10%,-15%), 48.5~61.8Hz
耗电量: 8.5KVA
控制柜尺寸:850700700 mm
控制柜重量:最大250kg
环境温度:5C- 45C
最大湿度:95%
防护等级:IP54
操作面板:控制柜上
编程单元:便携式示教盒,具备操纵杆和键盘
彩色触摸式显示,具中、英文菜单选项
安全性:紧急停止,自动模式停止,测试模式停止等
输入输出:数字式直流24V, 16进/16出, 输入输出板
3.4 机器人系统工作的部分要求
·与安装有关的土建参数
厂房净高:>4.5米
地基要求:
以上参数不含机器人底座,土建方应再考虑机器人底座重量。
·工件(牛奶箱)的参数要求
牛奶箱表面须平整,无皱褶,无不适合真空吸附的封箱材料。
牛奶箱尺寸:参见基本信息
牛奶箱重量: 8kg
·夹具的真空系统对真空有关参数的要求:
压缩空气:≥6 bar
耗气量:1500升/分.机器人(如夹取式为700升/分)
空气质量:3级 DIN ISO 8673-1
粉尘直径:< 0.005mm
粉尘含量:< 5mg/m³
油污含量:< 1mg/m³
露点:-20度
扫二维码用手机看
联系我们 / CONTACT US
客服电话:400-823-3356
国际贸易部:0635-2932233 15315726881
国内销售部:0635-2932233
邮箱:nobot@noboter.com Amy@noboter.com
地址:山东省聊城市高新技术产业开发区黄河路88号
Copyright © 2020 诺伯特智能装备(山东)有限公司
在线留言 / ONLINE MESSAGE
微信二维码 / SCAN ON WECHAT

视频号

服务号